






-

[NeurIPS 2023] GenPose: Generative Category-level Object Pose Estimation via Diffusion Models
In this study, we propose a novel solution by reframing categorylevel object pose estimation as conditional generative modeling, departing from traditional point-to-point regression.
Dec 11 / 2023 -

[NeurIPS 2023] Causal Discovery from Subsampled Time Series with Proxy Variable
In this paper, we propose a constraint-based algorithm that can identify the entire causal structure from subsampled time series, without any parametric constraint.
Dec 08 / 2023 -

[NeurIPS 2023] GraspGF: Learning Score-based Grasping Primitive for Human-assisting Dexterous Grasping
In this paper, we propose a novel task called human-assisting dexterous grasping that aims to train a policy for controlling a robotic hand's fingers to assist users in grasping objects.
Nov 30 / 2023 -

[TPAMI 2023] Human Motion Generation: A Survey
In this survey, we present a comprehensive literature review of human motion generation, which, to the best of our knowledge, is the first of its kind in this field.
Nov 15 / 2023 -

[NeurIPS 2023] Social Motion Prediction with Cognitive Hierarchies
Humans exhibit a remarkable capacity for anticipating the actions of others and planning their own actions accordingly. In this study, we strive to replicate this ability by addressing the social motion prediction problem.
Nov 14 / 2023 -

[NeurIPS 2023 Spotlight] A Scalable Neural Network for DSIC Affine Maximizer Auction Design
Overall, our proposed approach offers an effective solution to automated DSIC auction design, with improved scalability and strong revenue performance in various settings.
Nov 11 / 2023 -
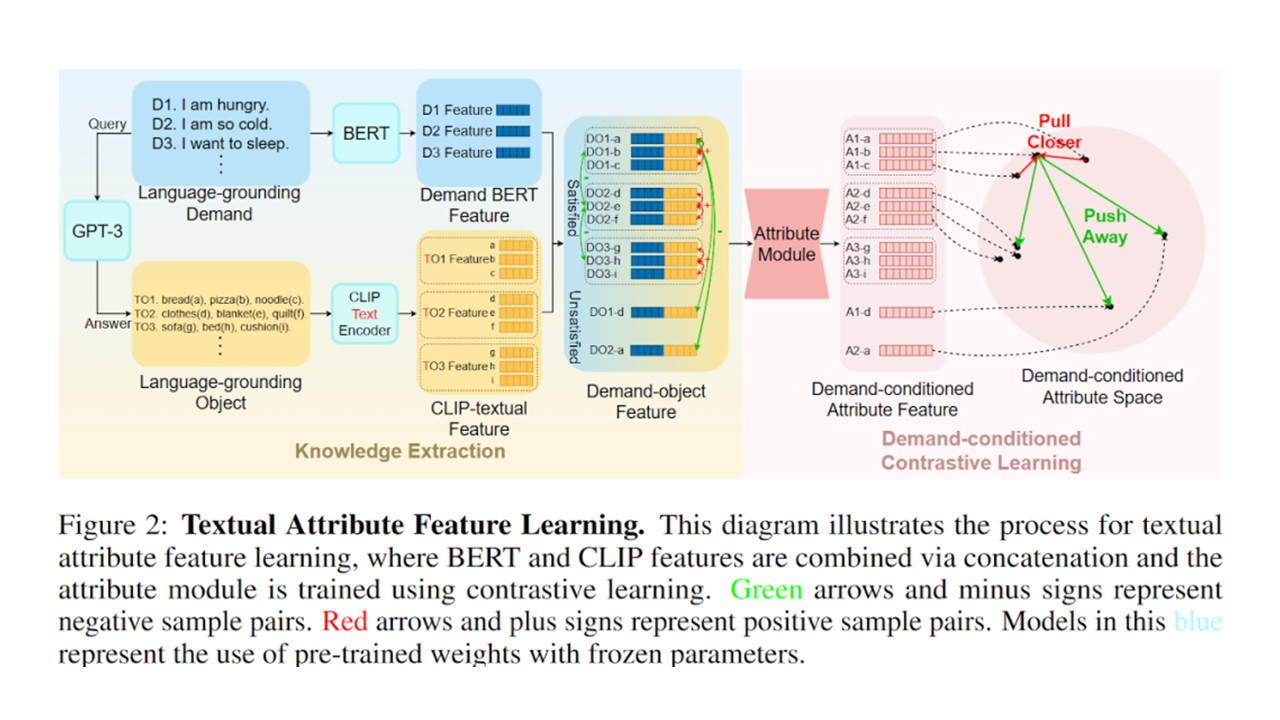
[NeurIPS 2023] Find What You Want: Learning Demand-conditioned Object Attribute Space for Demand-driven Navigation
Experiments on AI2Thor with the ProcThor dataset demonstrate the visual attribute features improve the agent's navigation performance and outperform the baseline methods commonly used in VON.
Nov 10 / 2023 -
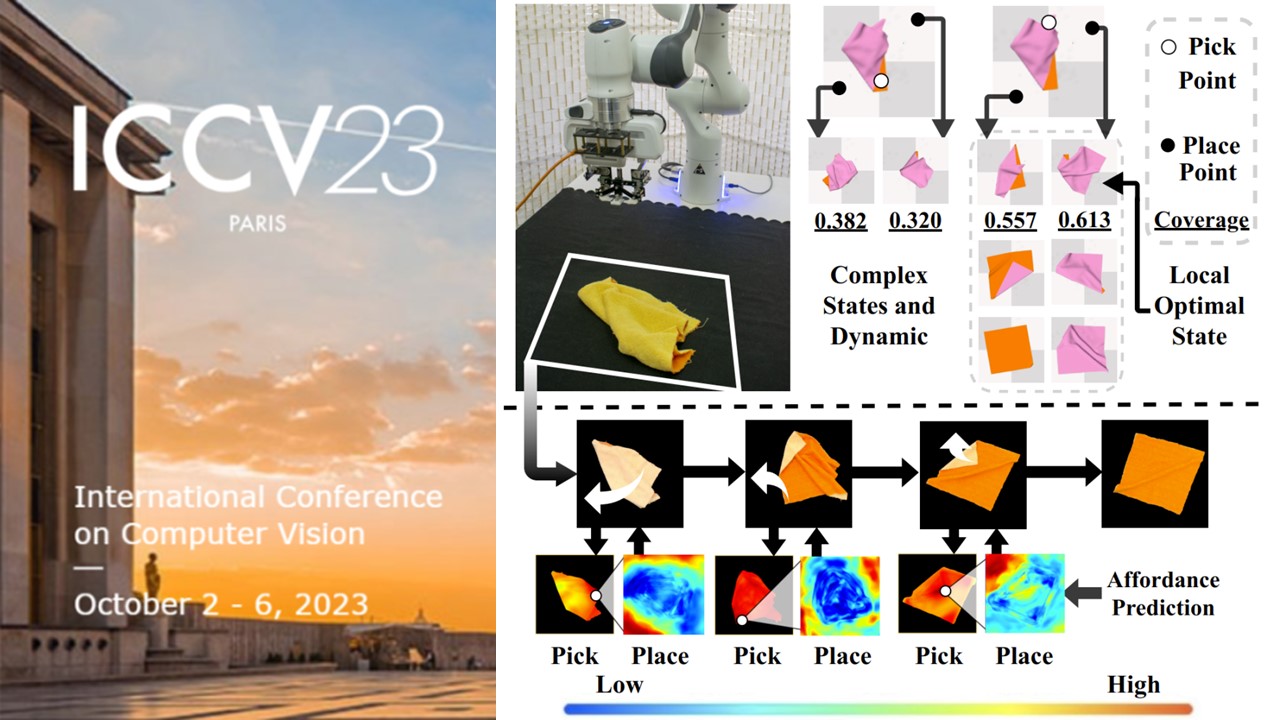
[ICCV 2023] Learning Foresightful Dense Visual Affordance for Deformable Object Manipulation
In this paper, we study deformable object manipulation using dense visual affordance, with generalization towards diverse states, and propose a novel kind of foresightful dense affordance, which avoids local optima by estimating states' values for long-term manipulation.
Oct 23 / 2023 -
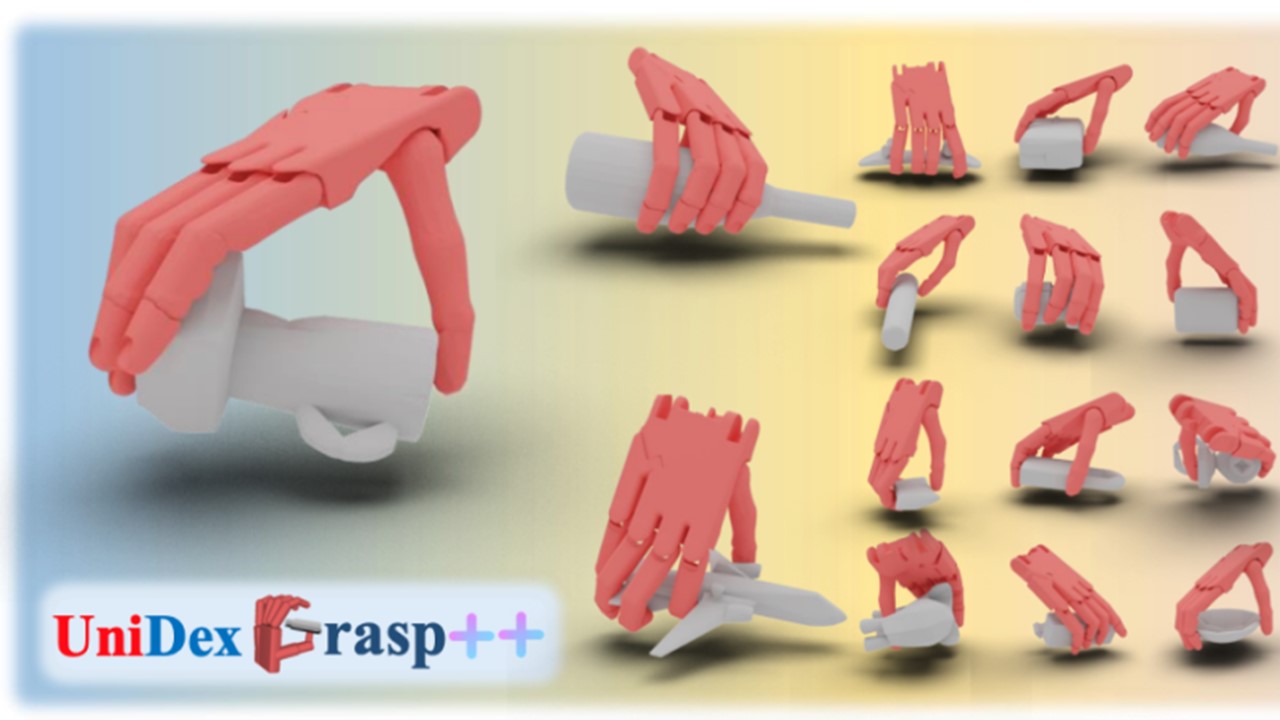
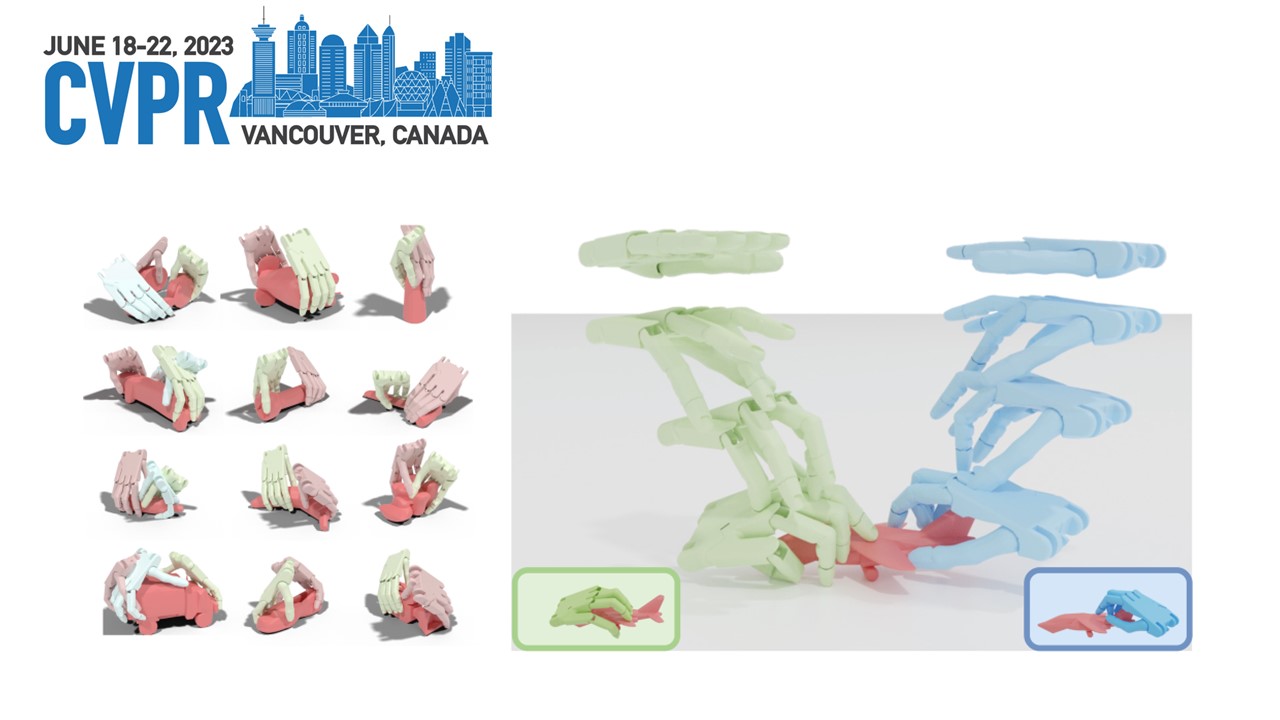
[ICCV 2023 Oral] UniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning
We propose a novel, object-agnostic method for learning a universal policy for dexterous object grasping from realistic point cloud observations and proprioceptive information under a table-top setting, namely UniDexGrasp++.
Aug 17 / 2023 -
[ICML 2023] Which Invariance Should We Transfer? A Causal Minimax Approach
Compared to previous methods, the obtained stable predictors are more effective in identifying stable information. However, a key question remains: which subset of this whole stable information should the model transfer, in order to achieve optimal generalization ability?
Aug 15 / 2023 -
[ICML 2023] Coordinated Dynamic Bidding in Repeated Second-Price Auctions with Budgets
We propose algorithms that guarantee every client a higher utility than the best she can get under independent bidding.
Jul 21 / 2023 -

[ICCV 2023] MotionBERT: A Unified Perspective on Learning Human Motion Representations
We present a unified perspective on tackling various human-centric video tasks by learning human motion representations from large-scale and heterogeneous data resources.
Jul 18 / 2023 -
[ICML 2023] Near-Optimal Quantum Coreset Construction Algorithms for Clustering
Our coreset reduces the input size from n to poly(kϵ^{−1}d), so that existing α-approximation algorithms for clustering can run on top of it and yield (1+ϵ)α-approximation.
Jul 12 / 2023 -
[ICML 2023] Are Equivariant Equilibrium Approximators Beneficial?
In this paper, we theoretically characterize benefits and limitations of equivariant equilibrium approximators.
Jun 20 / 2023 -
[Eurocrypt 2023] New Ways to Garble Arithmetic Circuits
In this work, we present new ways to garble arithmetic circuits, which improve the state-of-the-art on efficiency, modularity, and functionality.
May 25 / 2023 -
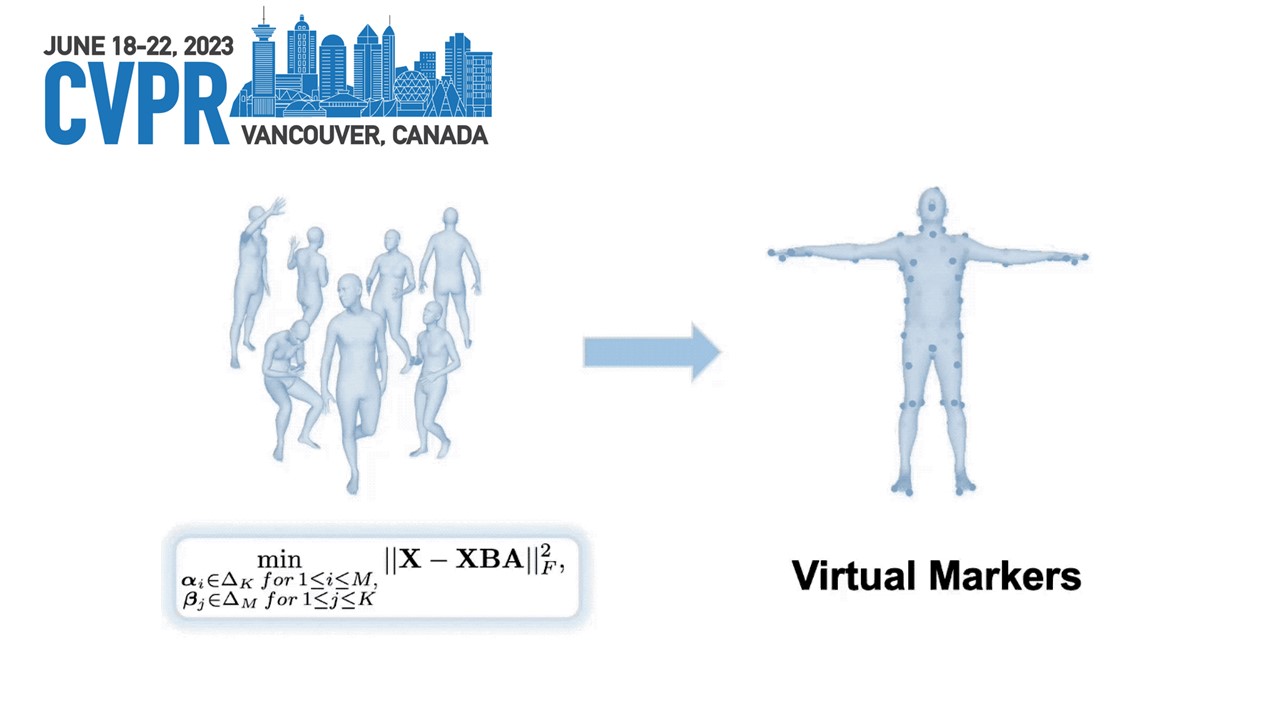
[CVPR 2023] 3D Human Mesh Estimation from Virtual Markers
In this work, we present an intermedi- ate representation, named virtual markers, which learns 64 landmark keypoints on the body surface based on the large-scale mocap data in a generative style, mimicking the effects of physical markers.
May 23 / 2023 -
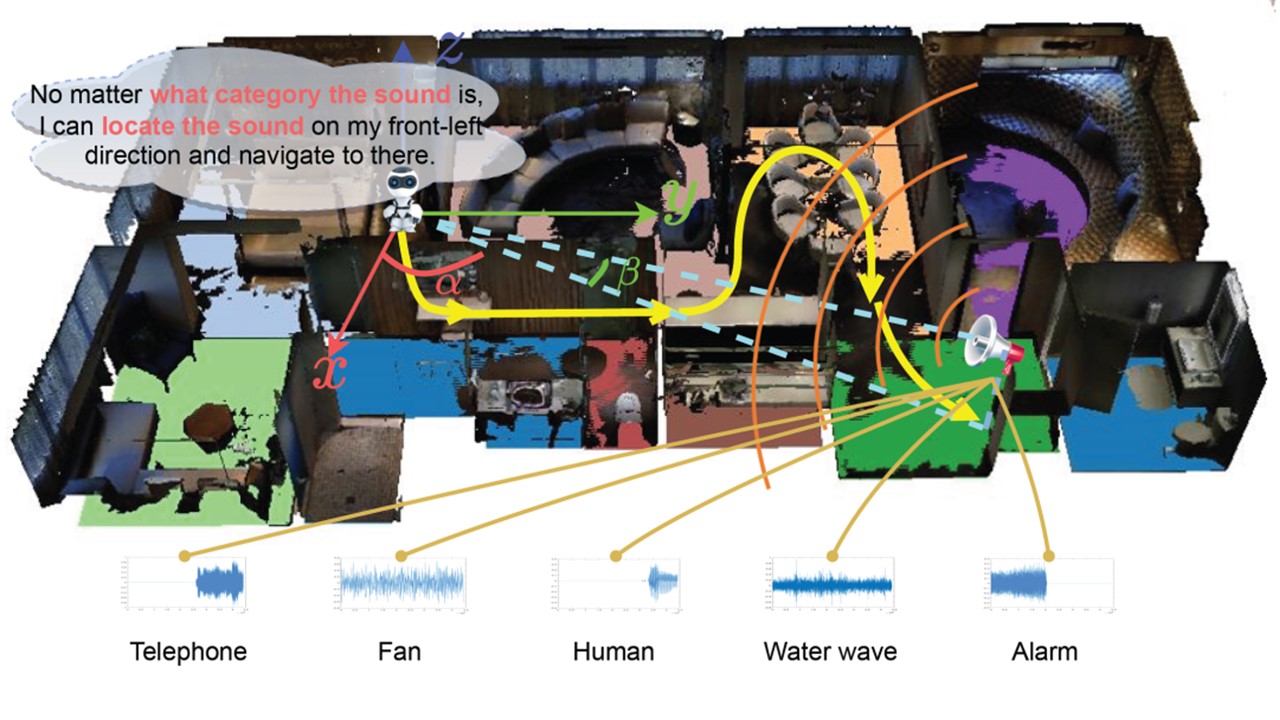
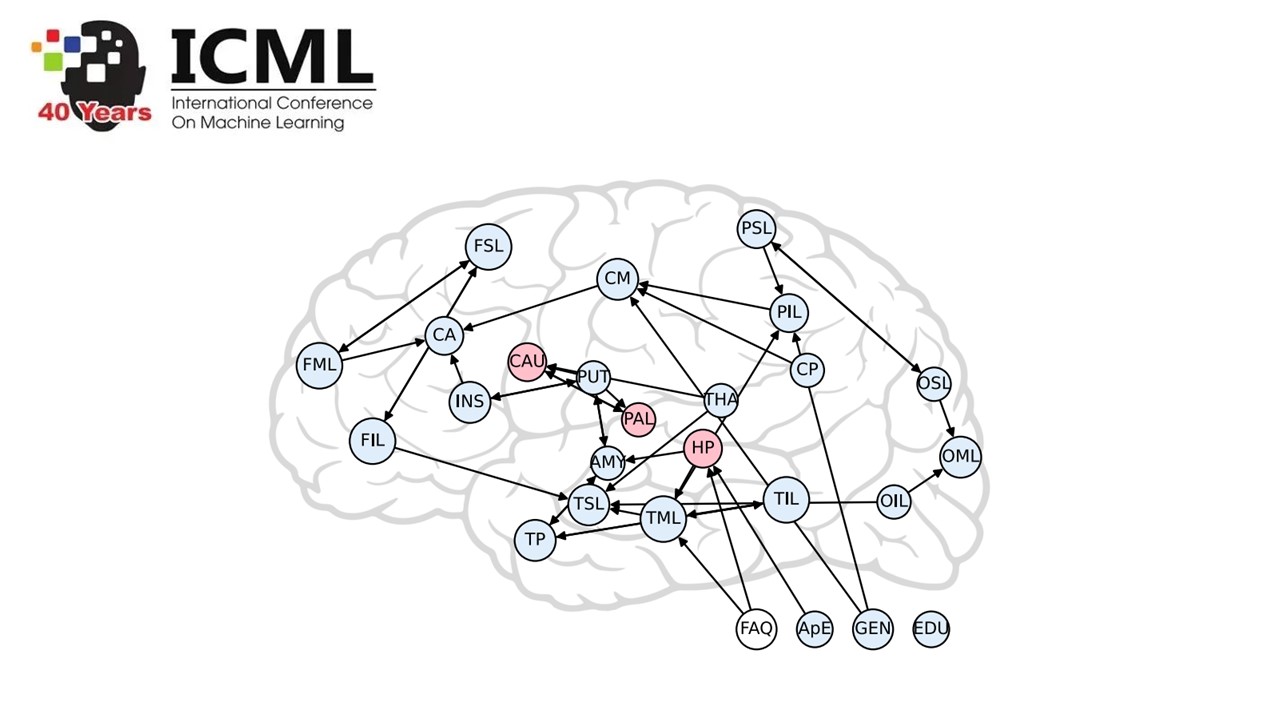
[RA-L 2023] Learning Semantic-Agnostic and Spatial-Aware Representation for Generalizable Visual-Audio Navigation
We propose a brain-inspired plug-and-play method to learn a semantic-agnostic and spatial-aware representation for generalizable visual-audio navigation.
May 08 / 2023 -

[ICML 2023] The Power of Uniform Sampling for k-Median
We show that any algorithm must make Ω(1/β) queries to the point set in order to achieve O(1)-approximation for k-Median.
May 05 / 2023 -
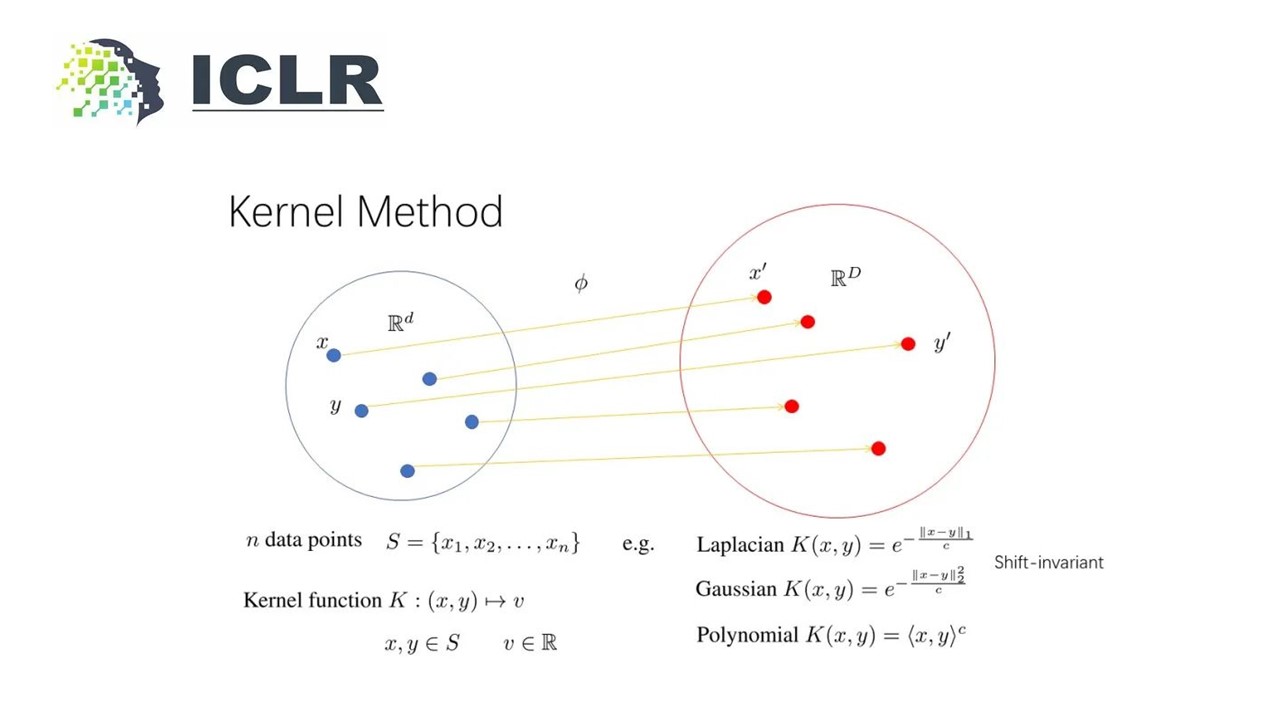
[ICLR 2023] On The Relative Error of Random Fourier Features for Preserving Kernel Distance
We show that for a significant range of kernels, including the well-known Laplacian kernels, RFF cannot approximate the kernel distance with small relative error using low dimensions.
Apr 28 / 2023 -
[CVPR 2023] UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
In this work, we tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting.
Apr 17 / 2023