






-

[WINE 2024 Best Paper] Aggregation of Antagonistic Contingent Preferences: When Is It Possible?
We study a two-alternative voting game where voters’ preferences depend on an unobservable world state and each voter receives a private signal correlated to the true world state.
Dec 14 / 2024 -

Professor Wen Gao Wins 2025 IEEE Innovation in Societal Infrastructure Award
Prof. Wen Gao won 2025 IEEE Innovation in Societal Infrastructure Award for contributions to and leadership in high-performance AI computing infrastructure and efficient video encoding.
Jul 02 / 2024 -
[ICALP 2024] Algorithms for the Generalized Poset Sorting Problem
May 16 / 2024 -

[ICML 2024] Language Models Represent Beliefs of Self and Others
In this study, we discover that it is possible to linearly decode the belief status from the perspectives of various agents through neural activations of language models, indicating the existence of internal representations of self and others' beliefs.
May 07 / 2024 -

[CVPR 2024] MaskClustering: View Consensus based Mask Graph Clustering for Open-Vocabulary 3D Instance Segmentation
We propose a novel metric, view consensus rate, to enhance the utilization of multi-view observations.
Apr 29 / 2024 -

[TIT] A Quantum Algorithm Framework for Discrete Probability Distributions with Applications to Rényi Entropy Estimation
In this paper, we propose a unified quantum algorithm framework for estimating properties of discrete probability distributions, with estimating Rényi entropies as specific examples.
Apr 28 / 2024 -
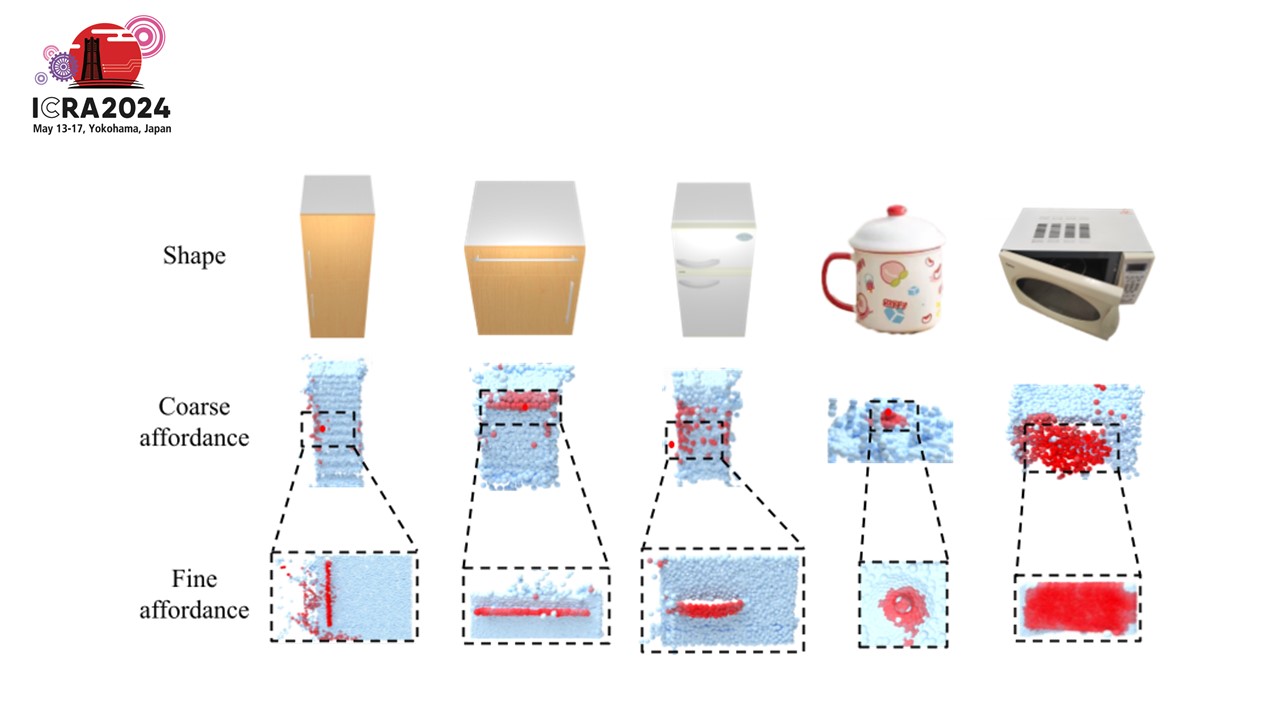
[ICRA 2024] Articulated Object Manipulation with Coarse-to-fine Affordance for Mitigating the Effect of Point Cloud Noise
To tackle this challenge, we leverage the property of real-world scanned point cloud that, the point cloud becomes less noisy when the camera is closer to the object.
Mar 28 / 2024 -

[ICRA 2024] RGBManip: Monocular Image-based Robotic Manipulation through Active Object Pose Estimation
We propose an image-only robotic manipulation framework that leverages an eye-on-hand monocular camera installed on the robot's parallel gripper.
Mar 15 / 2024 -

[ICRA 2024] Discuss Before Moving: Visual Language Navigation via Multi-expert Discussions
In this work, drawing inspiration from the expert consultation meeting, we introduce a novel zero-shot VLN framework.
Mar 13 / 2024 -

[TheWebConf 2024 Oral] Budget-Constrained Auctions with Unassured Priors: Strategic Equivalence and Structural Properties
Our main result shows that the Bayesian revenue-optimal mechanism and the budget-extracting bid-discount first-price mechanism yield the same set of Nash equilibrium outcomes in the unassured prior game.
Mar 12 / 2024 -
[Computer Science Review 2024] A survey on algorithms for Nash equilibria in finite normal-form games
This paper reviews various algorithms computing the Nash equilibrium and its approximation solutions in finite normal-form games from both theoretical and empirical perspectives.
Mar 11 / 2024 -

[AAAI 2024] Dynamic Budget Throttling in Repeated Second-Price Auctions
This paper provides a theoretical panorama of a single advertiser's dynamic budget throttling process in repeated second-price auctions.
Mar 09 / 2024 -

[ICRA 2024] GAMMA: Graspability-Aware Mobile MAnipulation Policy Learning based on Online Grasping Pose Fusion
In this work, we propose a graspability-aware mobile manipulation approach powered by an online grasping pose fusion framework that enables a temporally consistent grasping observation.
Mar 08 / 2024 -

[AAAI 2024] Competition among Pairwise Lottery Contests
We investigate a two-stage competitive model involving multiple contests.
Mar 06 / 2024 -

[DAC 2024] SpacePulse: Combining Parameterized Pulses and Contextual Subspace for More Practical VQE
In this paper, we explore the integration of parameterized quantum pulses with the contextual subspace method.
Mar 04 / 2024 -

[ICRA 2024] Bridging Zero-shot Object Navigation and Foundation Models through Pixel-Guided Navigation Skill
In this work, we propose a Pixel-guided Navigation skill (PixNav), which bridges the gap between the foundation models and the embodied navigation task.
Feb 29 / 2024 -

[ICLR 2024] Near-Optimal Quantum Algorithm for Minimizing the Maximal Loss
In this paper, we conduct a systematic study for quantum algorithms and lower bounds for minimizing the maximum of N convex, Lipschitz functions.
Feb 23 / 2024 -

Welcome Dr. Ruosong Wang to Join CFCS, Peking University
Welcome Dr. Ruosong Wang to join CFCS, Peking University as an assistant professor in January 2024.
Jan 10 / 2024 -
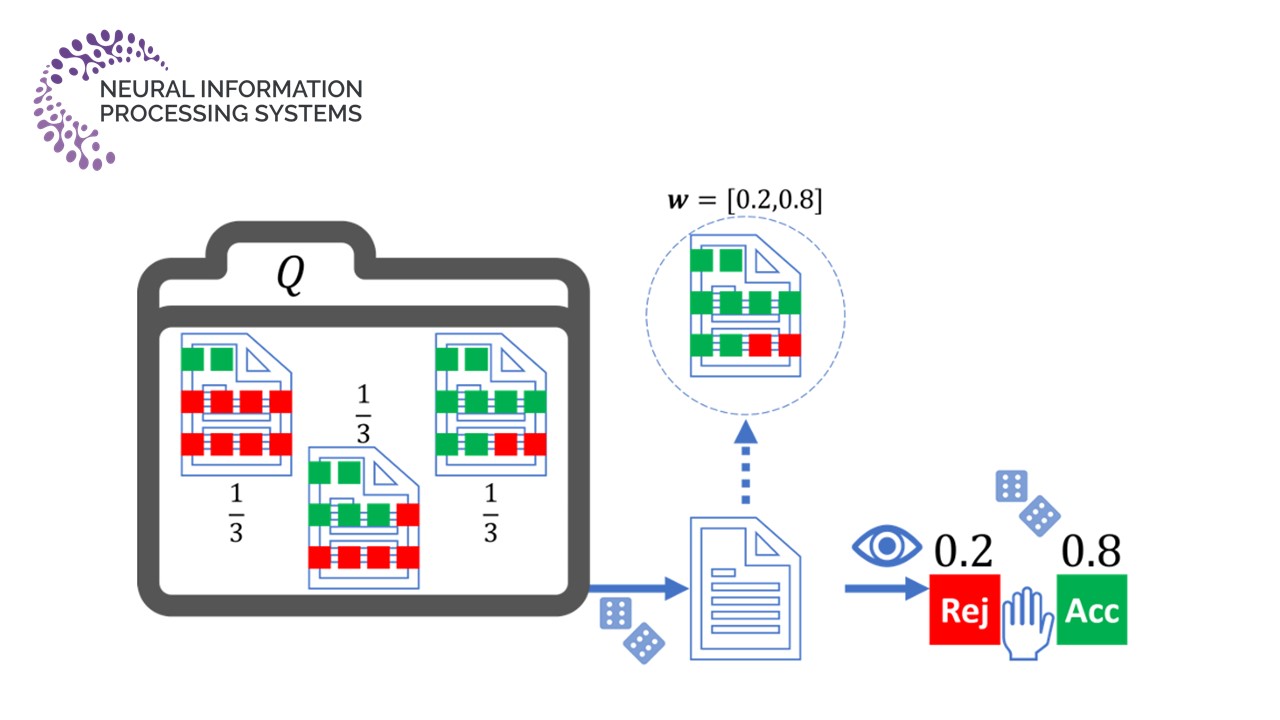
[NeurIPS 2023] Calibrating "Cheap Signals" in Peer Review without a Prior
Unlike previous works relying on prior knowledge or historical data, we propose a one-shot noise calibration process without any prior information.
Dec 13 / 2023 -
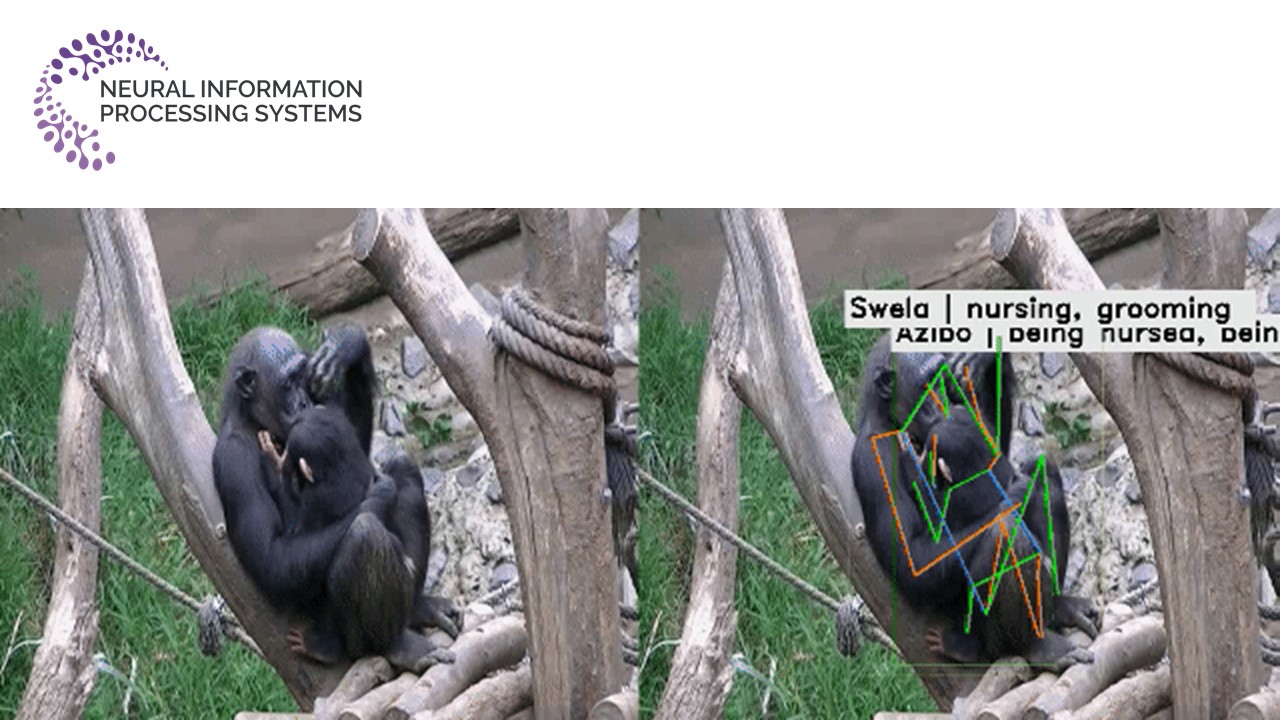
[NeurIPS 2023] ChimpACT: A Longitudinal Dataset for Understanding Chimpanzee Behaviors
Our experiments reveal that ChimpACT offers ample opportunities for both devising new methods and adapting existing ones to solve fundamental computer vision tasks applied to chimpanzee groups.
Dec 12 / 2023