






前沿计算研究中心2020级本科毕业论文答辩顺利完成
2024年5月,前沿计算研究中心2020级本科毕业论文答辩工作顺利完成。根据信息科学技术学院的工作部署,中心有序安排本次答辩工作,中心执行主任邓小铁教授、助理教授孔雨晴、姜少峰、王鹤、李彤阳、王若松等老师作为答辩评委参加。
来自北京大学信息科学技术学院、元培学院、物理学院的28位2020级本科生进行了毕业论文报告并顺利通过答辩,9人获评优秀毕业论文,3人获评信息科学技术学院2020级本科生“十佳”优秀毕业论文。祝贺!

A 组答辩合影

B 组答辩合影
信息科学技术学院2020级本科生“十佳”优秀毕业论文
基于三维视觉和基础模型的可泛化的灵巧机器人操控
耿浩然,信息科学技术学院2020级图灵班
指导老师:王鹤 助理教授
在快速发展的机器人和具身智能领域,打造通用智能机器人是一项重要且具有挑战性的目标。通用机器人在加速自动化、提升生产力、提供家庭护理、确保安全生产等方面具有举足轻重的作用。尽管学术界和工业界已经取得了显著进展,当前的机器人在三维感知和泛化能力上仍然受限,难以应对多样且不可预测的环境和任务。此外,现有的机器人操控技能缺乏灵巧性,导致需要精确控制和灵活操作的任务难以顺利完成。为了解决这些关键挑战,本论文探讨了如何利用三维视觉信息、基础模型和创新学习策略,增强机器人在操作任务中的泛化能力和灵巧操控能力。通过提出几种通用操纵任务的创新解决方案(如物体摆放、铰接式物体操纵、灵巧操控等),本文探索这些方法对机器人技术前景的潜在影响,使机器人更灵活、智能,适用于更广泛的领域和场景。

耿浩然答辩中
信息科学技术学院2020级本科生“十佳”优秀毕业论文
单目图像3D人体网格估计的概率方法框架设计
许苑,信息科学技术学院2020级本科生
指导老师:王亦洲 教授
单目图像下的 3D 人体网格估计本质上是一个不适定问题,主要表现为固有的深度歧义和遮挡问题。尽管最近的概率方法可以生成多个可能的假设估计,但很少有研究关注于如何从这些解决方案中提炼出高质量的估计。为了解决这一问题,我们提出了 ScoreHypo 框架。此框架首先通过我们设计的 HypoNet 生成一系列多样化且合理的估计假设,随后通过评分器 ScoreNet,来评估并得到出高质量的估计结果。
ScoreHypo 框架将生成假设的过程视为扩散模型的逆向去噪过程,其中 HypoNet 负责产生一组与图像特征有效对齐的多样化估计。接着,ScoreNet 对这些估计进行质量评估,并选择出优质的结果。实验结果证明,作为一个多假设人体网格估计器的 HypoNet,在现有概率方法中表现优越。通过 ScoreNet 选择的估计结果明显优于随机选择或简单平均方法。特别地,经过训练的 ScoreNet 显示出了出色的泛化性,能有效评估并显著降低现有方法的误差。

许苑与论文指导老师王亦洲合影
信息科学技术学院2020级本科生“十佳”优秀毕业论文
重复拍卖中的在线学习问题
杨宗骏,信息科学技术学院2020级本科生
指导老师:邓小铁 教授
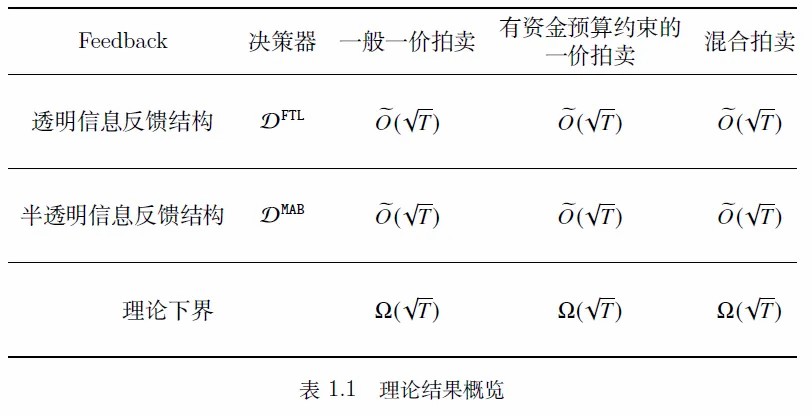
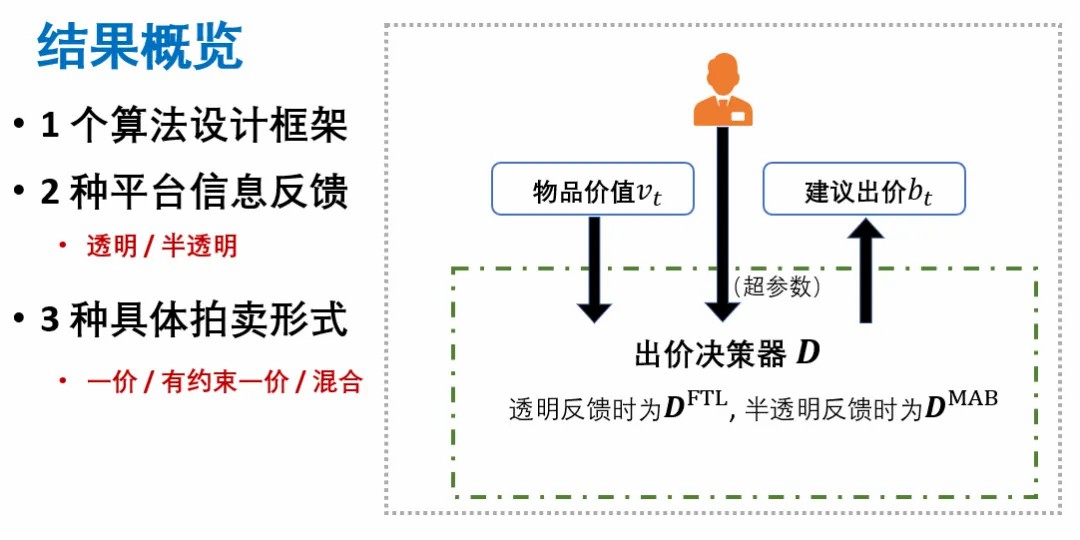
在线拍卖中的出价算法设计是机器学习与经济学交叉领域的核心问题之一。伴随着当今的互联网市场发展越来越趋向于大规模、数据驱动和算法化,在这一场景下的在线学习问题的研究也有重要意义。本文提出了一个服务于买家出价的在线学习框架,以出价决策器为核心,适应性地应用于多种拍卖形式。

杨宗骏(左2)与论文指导老师邓小铁和同学合影
中心2020级学生本科毕业论文信息
按学生姓氏首字母排序,*为优秀毕业论文
1. 陈威宇:基于嵌套马尔可夫模型的因果发现算法研究
2. 陈煜星*:可泛化的衣物晾晒操纵
3. 程凯:基于感知的遮挡环境物体操作学习
4. 杜雨时:关于多种深度学习空间表征在机械臂铰接轴结构物体操作中特性及通用性方法的研究
5. 范居令:未知内在状态下的机器人姿态的实时整体估计
6. 耿浩然*:基于三维视觉和基础模型的可泛化的灵巧机器人操控
7. 耿逸然*:基于端到端可操作性学习的机器人操纵框架
8. 胡晋侨:两两独立假设下的冲突解决算法
9. 梁世谦:可泛化的机器人末端执行器6D姿态估计
10. 刘瑞哲*:在真实环境中发现操作概念
11. 缪陆奕:用人类反馈对动作生成的扩散模型微调
12. 聂腾:多模态拓展下的Self-RAG架构:一种跨模态检索增强生成的实现
13. 宁川若:基于视觉可供性的柔性和铰接物体操作
14. 潘宇琦*:二阶信息辅助的鲁棒决策聚合
15. 宋铭宇:多智能体共识衡量指标及其应用
16. 孙皓然:基于深度学习的仿射最大拍卖机制设计
17. 万维康:基于视觉-语言大模型和三维输入的机器人导航
18. 汪逸阳:零样本、高度定制化的时尚领域图片生成
19. 王阳:一种可以用于场景编辑的三维高斯泼溅
20. 吴芊染:基于大语言模型的物体关系理解和遮蔽物体跟踪方法研究
21. 吴宇森:语言模型多维度对齐的分离和融合
22. 许苑*:单目图像3D人体网格估计的概率方法框架设计
23. 杨睿:人工智能在量子计算中的应用:以大规模层级化的量子电路设计为例
24. 杨宗骏*:重复拍卖中的在线学习问题
25. 印煜天:对鸽笼等和问题优化算法的实现与分析
26. 张嘉豪:含隐变量与删失反馈的阈值学习问题
27. 张业鑫*:量子算法在特定凸优化问题上的提升与局限
28. 赵橙阳*:基于零件深度恢复和抓取位姿估计的铰接物体感知和操控