






静园5号院前沿讲座:Dinesh Manocha谈非受控环境中的机器人系统设计
2022 年 1 月 14 日,马里兰大学帕克分校(University of Maryland,College Park)的 Dinesh Manocha 教授受邀于北京大学前沿计算研究中心作题为“Robot Operations in Uncontrolled Environments: Recent Work and Challenges”的在线报告。报告由中心陈宝权教授主持,相关内容通过蔻享学术、Bilibili、西瓜视频同步直播,线上线下累计近千人观看。

Dinesh Manocha 教授在线报告现场
在报告的开始,Manocha 教授介绍了机器人学在过去几十年间的蓬勃发展及机器人在工业和生活中的广泛应用,如仓储中的装载和运输机器人、工厂中的流水线机器人等等。虽然这些机器人都能够在经过特殊改造的、机器人友好的受控环境(如贴有定位的仓库)中有很好的表现,但它们都无法在动态、充满干扰的真实生活环境中正常运行,因而局限了机器人在更广泛的场景中发挥更大的作用。据此,Manocha 教授指出了研究非受控环境中的机器人控制算法的迫切性,如何在非受控的环境中让机器人更好地为人类服务自然成为了当下的热点问题。

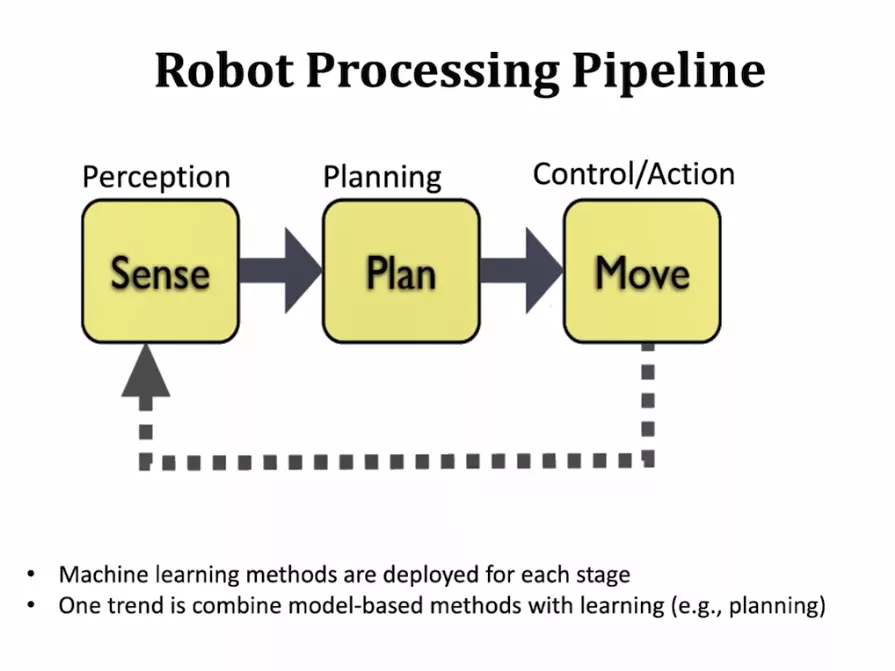
Manocha 教授提到,一个完备的机器人系统本质上是由 perception, planning, control/action 三部分组成的。通过逐项解决以上环节中存在的问题,Manocha 教授在多种非受控环境中搭建了高效、鲁棒的机器人自动化系统。在本次讲座中,他主要就三种典型的非受控环境中分享了自己工作:无人挖掘机、室内及室外真实环境中的机器人巡航、市区中的自动驾驶。
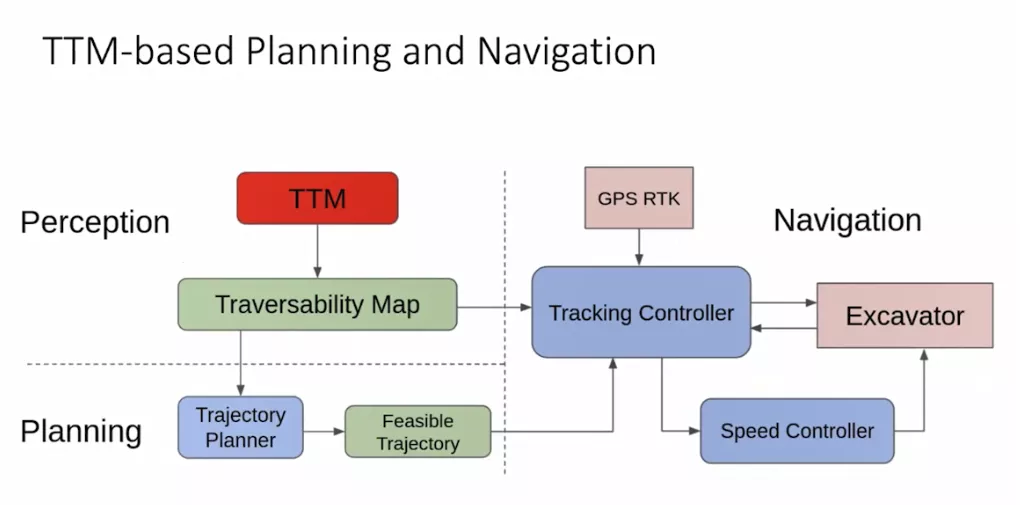
无人挖掘机需要在大型室外场景中进行挖凿操作,这种情况下的 perception 往往受制于环境噪音以及传感器的噪音,而 planning 及 control/action 部分却较简单,因为挖凿操作只需要较粗粒度的控制。因此 Manocha 教授着力于解决 perception 部分的鲁棒性。基于 coarse-to-fine 的思想,他提出了一个包含 Enhancement (De-dust), Material Classification, Semantic Segmentation, Instance Segmentation, 6-DoF Pose Estimation 这 5 个环节的流程。结合计算机视觉等领域中的机器学习技术,Manocha 教授针对这些环节提出了许多方法,例如 TTM、TaskNet 等,将非受控环境中的挖掘机表现提升至可与人类比肩的水平,实现了可以连续24小时无故障工作的自动化挖掘机。

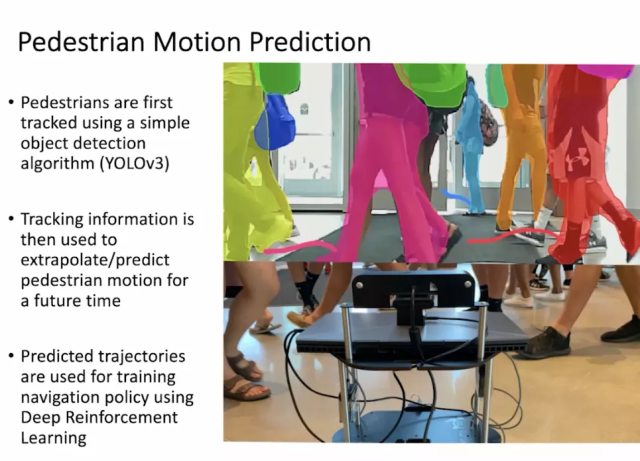
在密集人群中的机器人巡航问题是另一项缺乏研究的方向,之前的工作中有三大问题:仅限于稀疏人群、使用了昂贵的 lidar 以及多个深度相机、在障碍前机器人倾向于止步不前。Manocha 教授的方法通过价格较低的商用传感器作为输入,首先用追踪算法检测行人,随后根据已有的时序轨迹进行行人轨迹预测,最后结合行人轨迹进行强化学习避障策略,实现在密集人群中的自动巡航。同时,除室内密集人群的场景之外,Manocha 教授还探究了机器人在不平整地面上的室外自动巡航算法,很大程度上解决了机器人在经过崎岖路面时将自身卡住的问题。

为了解决复杂交通中的自动驾驶问题,Manocha 教授提出了追踪道路上实体的方法,这个系统甚至可以追踪交通工具中的司机和乘客。此外,Manocha 教授也研究了车辆在危险环境,例如大雾、暴雨等情况中自动驾驶的安全性问题。

在后续的提问环节中,Manocha 教授就机器人友好环境的构建、室内机器人领域的前沿方向以及机器自动控制系统的完备性、鲁棒性逐一做了解答,也提出了对未来工业领域的展望,希望有更多同学能够投身这一领域,解决诸多尚未被解决的问题。
小结:
本次讲座中,Manocha 教授一方面就过去几十年内机器人领域的发展做了回顾,就目前机器人的能力边界做了深入探讨,另一方面也就目前的学术前沿——非受控环境中的自动控制算法进行了深刻剖析。短短一个小时的讲座让大家快速了解了机器人发展的前世今生,也让大家对目前遇到的核心难点及相应技术有了一定了解,对在场的老师同学们都有着极大的启发意义。最后的展望部分中,Manocha 教授也就机器人领域未来的发展趋势给出了自己的看法,并鼓励大家积极参与未来机器人的发展,一起为人类智能化的明天献一份力。
报告视频回放:https://www.bilibili.com/video/BV1vT4y117bS/
报告人简介
Dinesh Manocha 教授是马里兰大学帕克分校 Paul Chrisman-Iribe 讲席教授、学校杰出教授,同时是 ACM, IEEE, AAAI, AAAS 会士。他的研究兴趣主要包括机器人、计算几何和基于物理的仿真算法。他发表了六百余篇论文,指导了四十多位博士,此外还致力于将学术项目落地,开发了诸多实用的软件包,并授权给六十多家企业,大大推动了智能机器人产业发展。